Cephがスケールできる理由、単一障害点を排除する仕組み、負荷を減らす実装:Ceph/RADOS入門(4)(4/4 ページ)
Ceph/RADOS が採用しているCRUSH、Paxosといった、分散したデータから正しく応答するための仕組みを支えるアルゴリズムの概要を学びながら、挙動を見ていきます。
オブジェクトをレプリケーションする際の挙動
クライアントは、CRUSHアルゴリズムでプライマリOSDを特定します。プライマリOSDというのは、レプリカ番号に0を指定して特定されたOSDです。クライアントは、オブジェクトをプライマリOSDのみに書きます。
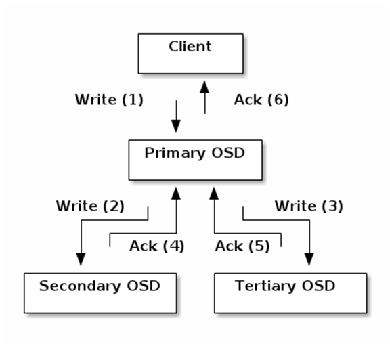
プライマリOSDは、CRUSHアルゴリズムで各レプリカを持っているOSDを特定します。各レプリカを持っているOSDとは、レプリカ番号に1、2、…、Nを指定して特定されたOSDです。Nはオブジェクト冗長度を指します。
プライマリOSDは、オブジェクトを各レプリカを持っている各OSDにコピーします。プライマリOSDは、オブジェクトがコピーされたことを確認するとクライアントに応答します。
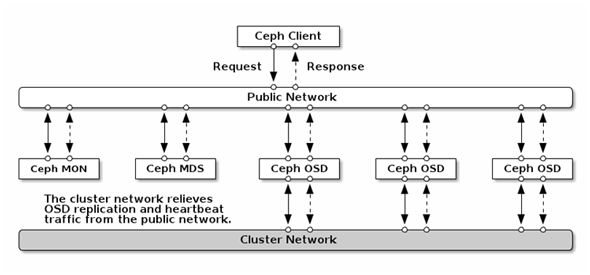
クライアントと各OSDは、パブリックなネットワークで接続されます。各OSD間は、パブリックネットワークとは別のネットワーク(クラスターネットワーク)で接続する構成が可能です。この場合、OSD間のオブジェクトコピー(レプリケーション)やリバランスのためのオブジェクトの移動はクラスターネットワークを使用して行われます(Ceph/RADOSのクライアントの挙動については第2回を参照ください)。
ペタバイトを超えるために活用するストレージノードの「インテリジェンス」
OSDの計算リソース(CPUやメモリ)は、クライアントへのサービス提供やOSD間のオブジェクトコピー(レプリケーション)やリバランスの他にも使用されます。分散ストレージならではの、ストレージノードそれぞれの「インテリジェンス」を活用した仕組みです。
| 用途 | 役割 |
|---|---|
| データレプリケーション | オブジェクトおよびレプリカの配置 |
| データマイグレーション | クラスターマップの更新に伴うデータレプリケーションの維持(OSD間のデータ比較) |
| 故障検出・修復 | OSDのHeartbeat監視、OSDダウン情報のmonitorへの報告(=クラスターマップの更新) |
| ピアリング | PGを格納する全てのOSDをPG内の全てのオブジェクトの状態について合意させるプロセス。PGログによるデータレプリケーションの修復 |
| クラスターマップの伝播 | クラスターマップの更新に伴うインクリメンタルマップ(差分マップ)の配布 |
| オブジェクトのロック管理 | 共有ロック、排他ロックの管理(ロックはオブジェクトの属性の一部) |
上記の表で見たように、多数のOSDが中央のmonitorの負荷をOSDのインテリジェンスを活用して分担する工夫がされています。こうした仕組みを持つことで、Ceph/RADOSではペタバイト単位を超えてスケールできるようになっているのです。
冒頭で言及したように、中央のmonitorが全てのOSDを監視するのではなく、OSD同士が監視し合う仕組みです。検出した他のOSDのダウン情報はmonitorに報告します。monitorはOSDダウンの情報をクラスターマップに反映します。この情報はOSD間のメッセージを使ってマップ更新の情報をクラスター内のOSDに伝播させます。
クラスターマップが更新されることで、各OSDの間で通信が行われ、クラスターマップが伝播すると、PGを構成するOSDによってオブジェクトやレプリカがPG内の「あるべき場所」に配置されます。OSDがダウンした場合だけでなく追加・削除される場合も同様の挙動になります。
同時に、PGを構成するOSD間でオブジェクトのレプリカ同士を比較するデータスクラビング(Data Scrubbing)も行います。比較はメタデータとメタデータのみを比較する「light scrubbing」と、データそのものも比較する「deep scrubbing」の二種類があり、比較的負荷の少ない前者は後者よりも高頻度で行っています。
Ceph Storage Clusterのハードウェア要件は?
さて、このように各ノードに一定の処理を委譲する仕組みを持つCeph/RADOSを動作させるために、ストレージクラスター側(Ceph Storage Cluster)はどの程度のハードウェア要件を持っておくべきでしょうか。
下に示す図はCeph Storage Clusterを動かすためのハードウェア要件(最小構成)です。ハードウェア要件についての詳細はCeph Documentationの「HARDWARE RECOMMENDATIONS」のページなどを参照してください。
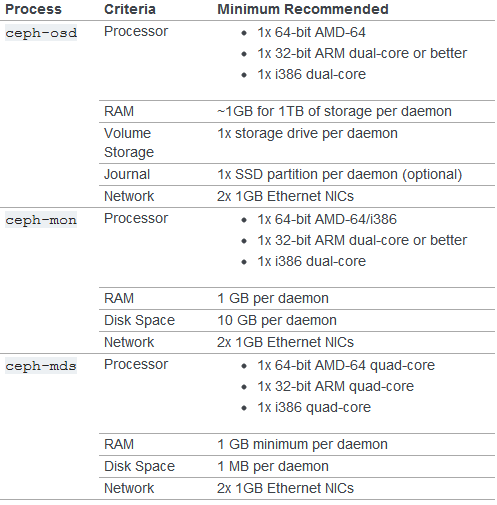
Ceph Storage Clusterを動かすためのハードウェア要件(最小構成)。出典:http://ceph.com/docs/master/start/hardware-recommendations/より抜粋
実運用で使われる際のCeph/RADOS商用製品スペックは
下図はDreamHostが提供しているプロダクションシステム「DreamObject」で実際に使用されているといわれるサーバーのスペックです。オブジェクト冗長度「3」で実効容量1Pバイトのシステムを99台のサーバーで構成しています。
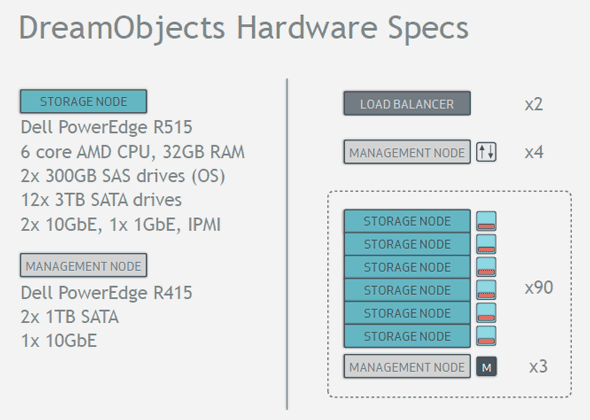
DreamHostのDreamObjectで採用されているサーバースペック(出典:http://ceph.com/presentations/20121102-ceph-day/20121102-dreamobjects.pdf)
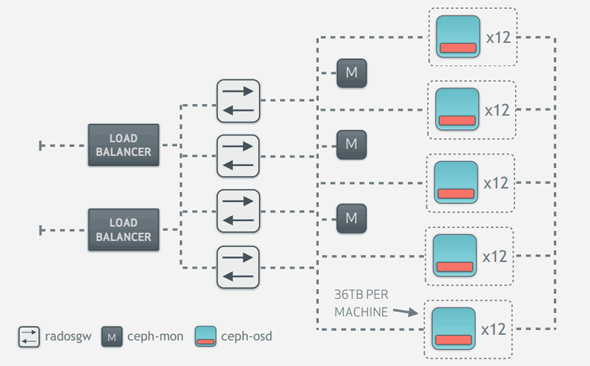
DreamHostのDreamObjectが採用している構成(概略)。出典:http://ceph.com/presentations/20121102-ceph-day/20121102-dreamobjects.pdf
今回はCeph/RADOSの挙動をアルゴリズムなどに触れながら紹介してきました。
Ceph/RADOSのアーキテクチャは、各クライアントがオブジェクトを持ったOSDに直接アクセスするので、クライアントやOSDの数が大きくなっても中央のコンポーネントが性能ボトルネックや単一障害点(SPOF)になることがないという特徴と、それを実現するためのクラスターマップやオブジェクトレプリカ整合性の維持に全OSDが協調して動作するという特徴があることが分かりました。
筆者プロフィール
佐藤友昭(さとうともあき)
VA Linux Systems Japan株式会社 クラウド基盤エキスパート。
UNIX系オペレーティングシステムの開発において、ローカルファイルシステム、ネットワークファイルシステム、論理ボリュームマネージャーなどを担当。
HPC向けネットワークファイルシステム、ディスクアレイ、Flash SSDアレイストレージの開発にも携わるなど、ストレージ開発のスペシャリストとして活躍する。
また、InfiniBandやiWarp(10GbE)などのRDMAネットワーク向けのファイルシステムプロトコル策定、リファレンス実装の分野におけるOSS開発の実績を持つ。
Copyright © ITmedia, Inc. All Rights Reserved.