ドローンの自律飛行に見る、人工知能の可能性とエンジニアの役割:特集:「人工知能」入門(4)(1/2 ページ)
楽天が2016年4月25日に発表した、ドローンを活用した消費者向け配送サービス「そら楽」の実現を支えるなど、自律飛行ドローンの実用化を進めている自律制御システム研究所。“自ら考え、自らを制御する”自律制御はビジネス、社会にどのようなインパクトをもたらすのだろうか。
着々と進む「自律飛行するドローン」の実用化
写真や動画の空撮をはじめ、物流、老朽化が懸念されるインフラのメンテナンスなど、ドローンの活用範囲は広がるばかりだ。政府もこの分野には注目しており、2015年12月に改正航空法を施行して無秩序なドローン利用の規制に乗り出すと同時に、「小型無人機に係る環境整備に向けた官民協議会」を設立。ドローンの活用や技術開発に向けたロードマップ策定を進めるなど、両面で枠組みを整えようとしている。
そんな中、ドローンのさらなる活用を考える上で欠かせないのが、周囲の状況を把握し、機体自身が判断を下し、適切に飛行する「自律飛行」の実現だ。現在のドローンのほとんどは、ラジコン飛行機のような遠隔操作が前提となっている。つまり「操縦者」が欠かせない。だが、高齢化社会に向かう日本で人手不足が指摘される物流・運輸市場をはじめ、質量ともに本格的な活用を考えると、自律飛行は欠かせない技術となる。
この分野に長年取り組んできたのが、千葉大学から生まれたスタートアップ企業、自律制御システム研究所(ACSL)だ。代表取締役CEOを務める野波健蔵氏は、千葉大学 野波研究室で、「ドローン」という言葉が生まれるはるか以前から、小型飛行ロボットの自律制御技術の確立に向けた基礎研究を進めてきた。
その成果をビジネスに生かそうと2013年11月に設立したのが同社となる。2014年から同社取締役に就任し、自律制御のシステム開発を担う岩倉大輔氏は、その研究開発とビジネス推進をリードしている。
実際、自律制御や複数の機体の編成飛行といった同社の技術は、市場からも注目を集めており、ビジネスシーンでの実用化が着実に進んでいる。例えば楽天が2016年4月25日に発表したドローンを活用した消費者向け配送サービス「そら楽」はご存じの方も多いのではないだろうか。
参考リンク:そら楽(楽天)
こちらにもACSLが開発したマルチコプター型ドローンが活用される予定だ。千葉県はドローンの国家戦略特区に指定されており、今後他の配送にも活用していくと見られている。

ACSLのドローンは、災害発生時の気象観測や現地調査など、人間にとって危険性の高い場所での作業を手助けするものとしても期待されている。その顕著な例が、福島第一原発事故における汚染区域の空間線量の測定だ。この実証実験ではGPSを使った遠隔制御によるものだが、人の立ち入りが困難で、しかもさまざまな機器や障害物があると予想される原発建物内の調査のためのドローン開発も進めているという。
もちろん、ビジネス領域での活用も進展中だ。測量・計測や空撮、設備やインフラの点検、農業などがあるという。
「例えば農業では、単なる農薬散布ではなく、これからの精密農業に活用されると考えています。今は農薬を撒いたらそれでおしまいで、フィードバックがありません。これに対し精密農業は、近赤外線カメラで生育状況を計測し、作物の生育状況をマップ化して、どこに農薬を散布すべきか、追加すべきかが分かるようにします。最大の効率で作物を収穫するといったことが可能になります」
3つのレイヤーを制御し、非GPS環境での自律飛行を実現
では、同社の自律制御技術とはどんなものなのだろうか?
現在のドローンのほとんどは遠隔操作とGPS電波に頼って飛行している。だが、ドローンに対する期待が高まるにつれ、工場やトンネル、建物の中や周囲に障害物があるような場所など、「GPS電波の届かない場所でも飛ばしたい」というニーズが高まっている。

こうした要望に答えるのが、ACSLが開発した非GPS環境下での自律飛行を実現する「SLAM(Simultaneous Localization And Mapping)」と、ドローンの自律的な安定飛行を実現する「Minisurveyor Autopilot」だ。
これらは平たく言えば「障害物を避け、経路通りに進んでいくにはドローンをどうやって飛ばせばいいか、そのためにどのモーターをどれだけ回転させればいいかを計算している」。一種の人工知能といえるだろう。岩倉氏によると、ドローンの制御は大きく3つのレイヤーに分かれているという。
「最も下位のレイヤーはジャイロセンサーや角速度センサー、加速度センサーを用いて求めた姿勢角に対して制御を行うといったもので、人間で言えば、脊髄反射や心臓を動かすといった、生き物として必要不可欠なコントロールに当たります」
次のレイヤーが、GPSに代表される速度や位置のコントロールになる。これにより、速度や位置情報を把握し、機体の移動速度などを制御する。3番目のレイヤーは、障害物を回避しつつ、どのように機体が動くべきかを計算するものだ。
「2番目のレイヤーと3番目のレイヤーはどちらも位置の制御に関わりがありますが、2番目のレイヤーは現在地近傍、3番目のレイヤーは大局的な挙動を決定するという違いがあります」
同社ではこれを、機体に搭載されたレーザーセンサーを用いて実現している。
「レーザーを使うことで、例えば『今、機体が向かっている方向には障害物がある』ということが分かる仕組みです。目的地を目指すために、障害物を迂回できるルートを計算し、障害物をよけて飛んでいくといった処理を行います」
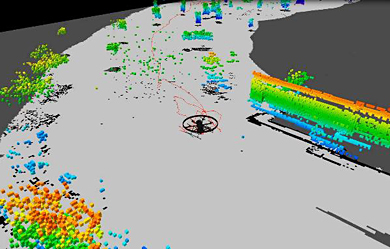
SLAMはこうした「複数のレイヤーにまたがる処理」をサポートするために重要となるソフトウェア(※)で、野波研究室で蓄積してきた成果を活用したものだという。野波研究室ではもともと、マルチローターヘリコプターに比べて、より制御が難しいシングルローターヘリコプターの制御技術を研究してきた。複雑なリンク機構の制御に関するノウハウを活用することで、よりシンプルなマルチローターヘリコプターの制御が可能になっているという。
※SLAMは位置の計算を行い、SLAMの出力データを使う別プログラムが軌道生成を行っている。また、SLAMと軌道設計は負荷の大きい処理のため別ユニットで行っている
「SLAMは知能というよりもセンシングの技術となります。SLAMはドローン周辺の障害物環境と、ドローンの現在位置を与えてくれるので、大局的なルート決定に役立ちます」
ドローンという言葉が生まれる以前からマルチローターヘリコプターの研究に取り組んできた岩倉氏は、「マルチローターヘリコプターは機構がシンプルなので、持ち運びできる機材が大きくなり、機体の重量以上のものも持ち運べます。より高性能なコンピュータやセンサーを本体に載せることもでき、もっと自由度が高くなります」と、その可能性の高さを語る。
Copyright © ITmedia, Inc. All Rights Reserved.
関連記事
 もう絶望しない! ディープラーニングによる画像認識のビジネス活用事例
もう絶望しない! ディープラーニングによる画像認識のビジネス活用事例
最近注目を浴びることが多くなった「Deep Learning」と、それを用いた画像に関する施策周りの実装・事例について、リクルートグループにおける実際の開発経験を基に解説していく連載。今回は、Deep Learning/CNN(Convolutional Neural Net)をどうビジネスに活用しているかに焦点を当て、その試行錯誤の過程を紹介します。 バンナム、スクエニ、東ロボ、MS――人工知能や機械学習はゲーム開発者に何をもたらすのか
バンナム、スクエニ、東ロボ、MS――人工知能や機械学習はゲーム開発者に何をもたらすのか
8月26日に開催されたゲーム開発者向けイベントの中から、バンナム、スクエニ、東ロボ、MSなどによる人工知能や機械学習、データ解析における取り組みについての講演内容をまとめてお伝えする。 人工知能で“賢い”工場を実現するアプリケーション開発プラットフォーム――ファナック、シスコらが発表
人工知能で“賢い”工場を実現するアプリケーション開発プラットフォーム――ファナック、シスコらが発表
ロボットやCNC(コンピュータ数値制御装置)を提供するファナックは2016年4月18日、米シスコシステムズらと共同で工場内の機器をネットワーク接続し、機械学習などにより産業用ロボットの生産性向上を実現するためのアプリケーション開発用プラットフォームを発表した。