Windows 10移植、ドローン、Eddystone、Blink――プラットフォームを超えるAndroidの今を知る:ABC 2015 Summerリポート(3/4 ページ)
業務にどう生かす? Androidベースでドローンアプリが作れるDronekit
お昼過ぎからは、ドローン関連のトラックが6つ続き、参加者の関心を誘った。その詳細トラックを前に、ドローン開発の全体像をおさらいする「オープンソースによるドローンの開発の概要」が行われた。
 himamura(今村博宣)氏
himamura(今村博宣)氏最初に登壇したhimamura(今村博宣)氏は、Linux Foundationで2014年10月に発足された、無人機のフライトコントローラーなどをオープンソースで開発するプロジェクトを紹介。同プロジェクトには、3DR(3DRobotics)、インテル、box、Parrot、enRouteなどが参加し、オープンソースのソフトウエアおよびハードウエアの両面から無人ヘリや無人飛行機、無人ビークルを開発できる「Dronecode」に取り組んでいる。
「現在ドローンで有名な企業にDJIがあるが、同社は設計から製造、販売まで全て自社で行う。一方で、Dronecodeの中心となる3DRはフライトコントローラー部分を全オープンソースで公開するなど、Android的なアプローチでドローン市場を開拓している」(himamura氏)
Dronecodeが動くハードウエアには、PX4、PIXHAWK、Arsov AUAV-X2、APM2.6(APM2.x)、VRBrain、PixHaw Fire Cape、NavIO+がある。また、Dronecode関連の新プロジェクトで、ドローンアプリを開発する「Dronekit」では、Androidアプリを作成するためのオープンソースのAPI群なども提供しており、ドローンの可能性を広げている。
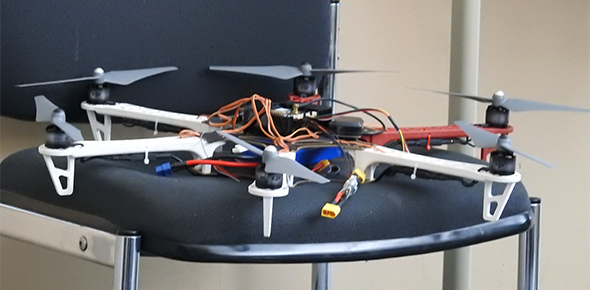 セッション会場に置かれていたドローン
セッション会場に置かれていたドローン例えば、農業用ドローンも可能性の一つだ。「農薬散布では通常、人がラジコンを操作しているが、これでは飛行速度にムラが出て、風の影響で速度が変わるのだが、速度に応じた散布量の調整などはできない。Dronecodeであれば、ポンプのモーターを飛行速度に応じて制御し、農薬タンクの残量、圧力センサーや流量センサーによるポンプの正常稼働をチェックするなど、専用コントローラーを作り込むことでさまざまな制御が可能になる」
himamura氏は、こう述べる。「車には、ダンプカーやショベルカー、耕運機などさまざまな種類があるが、これらは目的に合わせて開発されている。ドローンもそういう時代に突入した。今後はエンジニアがオープンソースを活用し、どんどん開発に携わってもらえることを期待している」
himamura氏の講演資料は、下記から確認できる。
続いて登壇した日本Androidの会 ドローンWGのhsgucci氏は、まずドローンを「ラジコンにマイクロコンピューターやセンサーを付けて姿勢制御し、GNSSを取り付けて移動を自動化したもので、ミキシング、フライバイワイヤーによる自動制御、空撮、完全自動飛行が可能なもの」と定義した。
ドローンの運用形態は、ラジコンのような使い方で高い目視の操縦スキルが求められる「近距離」、一人称視点でカメラ映像を見ながら操縦する「中距離」、GNSSによる完全自立型の「遠距離」に分けられる。「現在は、ほとんどが近距離運用に集中しており、今後どう広がっていくか注目したい」とhsgucci氏は言う。
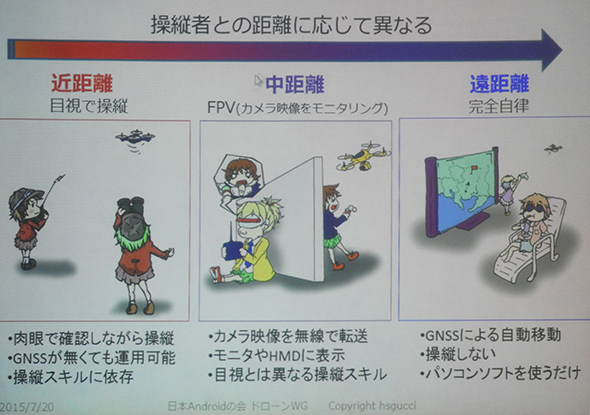 ドローンの運用形態(hsgucci氏の講演資料より)
ドローンの運用形態(hsgucci氏の講演資料より)ドローンには、プレデターやグローバルホークといった軍事用途でよく見られる固定翼機、農薬散布などで活躍するヘリコプター、複数プロペラを持つマルチコプターの3種類がある。
中でも人気なのは、マルチコプターだ。プロペラーの配置によってトライコプター(3枚羽)、クアッドコプター(4枚羽)など呼び名が変わり、大きさは手乗りサイズの世界最小クワッドから、ペイロード10?以上の大型機まで幅広い。「長距離飛ばしたいならエンジン搭載してシングルコプターにすればいいのに、みんなマルチコプターがいいらしい(笑)」(hsgucci氏)
マルチコプターが人気の理由は、組み立てや整備交換が簡単で、新規参入しやすいからだ。そのことから、多様な用途向けに展開されており、空撮から測量、災害地調査、物流、IT農業、さらには49台のLED搭載ドローンによる飛行アートといった芸術面での活用まで、さまざまだ。無限の可能性を秘めるドローン市場に、会場に詰めかけた参加者は熱い視線を送った。
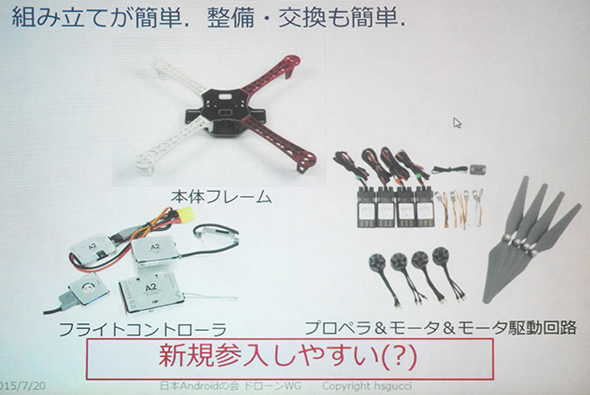 なぜマルチコプターが人気なのか?(hsgucci氏の講演資料より)
なぜマルチコプターが人気なのか?(hsgucci氏の講演資料より)hsgucci氏の講演資料は、下記から確認できる。
関連記事
 Windows 10、Drone、Bridge、Office 365 API、MSのいろんな「本気」をリアルに感じた2日間――学生リポーター隊が見た「de:code 2015」
Windows 10、Drone、Bridge、Office 365 API、MSのいろんな「本気」をリアルに感じた2日間――学生リポーター隊が見た「de:code 2015」
日本マイクロソフトが5月26、27日に開催したテクノロジカンファレンス「de:code 2015」に、「未来ラボ学生リポーター隊」の3人が参加した。彼らに基調講演の感想や「特に印象に残ったセッション」について聞いてみた。 プログラマーは本当に料理が得意なのか――クックパッドで「C丼」作って検証してみた
プログラマーは本当に料理が得意なのか――クックパッドで「C丼」作って検証してみた
3月中旬、東京・恵比寿のクックパッドにおいて、少し変わった試みが行われた。日本マイクロソフトとクックパッドの6人のエンジニアが力を合わせて「料理」に挑むというものだ。果たして、この試みの目的は何なのか。そして、出来上がった料理はどんなものだったのか。その過程とともにリポートする。 BaaSとUXガイドラインの活用によるiOS/Androidからの移植の実際
BaaSとUXガイドラインの活用によるiOS/Androidからの移植の実際
ハウス食品のアプリ「スパイスレシピ」について、移植時のガイドライン活用やAzureを用いた独自機能実装などを担当者から聞いた。 フラットデザイン実装における3つの重要なポイントとは
フラットデザイン実装における3つの重要なポイントとは
フラットデザインをよく知る筆者が、グリッド、タイポグラフィ、予測の3つの観点からMS提供の「Windows 8.1ユーザー エクスペリエンスガイドライン」を読み解いていく。 Webレンダリングエンジン「Blink」の2014年の目標は「モバイルでの成功」
Webレンダリングエンジン「Blink」の2014年の目標は「モバイルでの成功」
米グーグルの担当者が、ChromeブラウザーのWebレンダリングエンジン「Blink」の2014年の目標を説明した。 スルー防止も? BLEがもたらすビジネスチャンス
スルー防止も? BLEがもたらすビジネスチャンス
最近、Bluetooth Low Energy(BLE)に関するニュースを目にする機会が多くなった。この新しいスキームを利用した、さまざまなサービスの可能性について考えてみたい。
Copyright © ITmedia, Inc. All Rights Reserved.
アイティメディアからのお知らせ




注目のテーマ

編集部からのお知らせ
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。