RPAにおけるロボットファイル開発、3つの製品タイプの違いとは:RPA導入ガイド(9)
RPA(Robotic Process Automation)とは何かという基本的なことから、導入するためのノウハウまでを解説する連載。今回は、ロボットファイル開発とシステム開発について解説します。
RPA(Robotic Process Automation)とは何かという基本的なことから、導入するためのノウハウまでを解説する本連載「RPA導入ガイド」。前回まで、「全体計画」「机上検証」「PoC」「評価・修正」「導入・構築」の5つの導入プロセスに基づいて解説を進めてきました。
連載第9回となる今回は、最終のプロセスである「導入・構築」の根幹であるロボットファイル開発とシステム開発について解説します。
読者の皆さんは、既に本連載を通じて、RPAの導入に関する知見を十分に持てたかと思います。今回は少し細かくなりますが、ロボットファイルの開発を理解できるように、具体的かつ実践的な内容を見ていきます。
初めに、ロボット開発の例から解説しますが、ご自身や所属する組織に適した「ロボット探し・選び」の参考になれば幸いです。
ロボットファイル開発は3つのタイプがある
連載第2回でロボットの作成に際して、おおまかに3つのタイプがあることを紹介しました。
「画面キャプチャー」タイプ、「オブジェクト」タイプ、「プログラミング」タイプの3つです。
また、連載を通じてRPAの製品はさまざまであることも述べてきました。おさらいを終えたところで、どのように違うのか、それぞれのタイプで比較的知られている典型的な製品の画面例を見ていきます。
本稿だけで各製品の全体像を把握するのは難しいので、あくまで参考として捉えてください。
ロボットファイル開発の違いを見る
3つのタイプを簡単に見ていきますが、コードを書くようなことはなく、記録や提供されているアクションの選択で定義を進めていくのが、ロボットファイル開発の特徴の一つでもあります。
(1)画面キャプチャータイプの例:WinActor
例えば、複数のアプリケーションをつなぐロボットファイルの開発などの場合には、最初に主な操作の大枠のグループを作成して、続いて詳細を定義していきます。
下記は、あるアプリケーションからWebアプリにデータを入力していく一コマです。

先に図表1で、途中までシナリオの大枠を作成した画面を見ました。そこに至るまでは、図表2のメイン画面で、赤丸の「編集/記録」をクリックして、記録させたい操作を実行します。
 図表2 WinActor メイン画面による記録
図表2 WinActor メイン画面による記録
Webアプリのリストボックスで、あるデータを選択した後でテキストボックスに文字列を入力し、ボタンをクリックした操作の結果として、図表1の「リスト選択(IE)」「文字列設定(IE)」「クリック(IE)」の各アクションが追加されます。
同じような機能としては、Excelの「マクロの記録」を思い浮かべればよいでしょう。
WinActorは、図表1のように、分かりやすくて開発がしやすい製品だと思います。
同様な手順を備えた製品としては、「UiPath」などが挙げられます。
(2)オブジェクトタイプの例:Kofax Kapow
複数のアプリケーションをつなぐ例で言えば、変数を定義して、変数がどのようにアプリケーション間を動いていくかをロボットファイルとして定義していきます。
例えば「ファイルをロードする」「Excelを表示する」などの各オブジェクトに対してのアクションを選択して作成していきます。

上段にあるホームベース型や角丸四角形を「アクションステップ」と呼んでいます。
操作ごとに、それぞれのオブジェクトに対するアクションを「選択」して進めていくのが特徴です。ロボットファイルを作り始める際にロボットのイラストなども出てくるので、「ロボットを作っている」実感が持てる製品です。同じようなタイプとしては、「BizRobo!」などがあります。
(3)プログラミングタイプの例:Pega
Pegaは、Microsoft Visual Studioを開発のプラットフォームとして利用しています。
複数のアプリケーションをつなぐ例で言えば、「Solution」の配下にアプリケーションごとに「Project」を作成してから、「Automation」の「デザイナウィンドウ」に各Projectから部品を配置します。
プログラミング的な説明になってしまいましたが、言い換えると、アプリケーションごとに、それを解析した定義体を作成して、それらの定義体から、さらにロボット専用の定義体に必要な部品を持っていきます。

この画面例では4つの部品があります。部品は「デザインブロック」と呼ばれています。
Visual Studioに慣れ親しんできた方にはお勧めです。比較的近いタイプとして、「Automation Anywhere」があります。
内製であれば組織に合う製品を
3つのタイプを見て、どのタイプがご自身や所属する組織に合っているか、イメージできたのではないでしょうか。
現実にはあり得ない話ですが、もし各製品の機能や性能がほぼ同じだったとしても、ロボットファイル開発の細かい進め方は上記のようにさまざまで画面も異なります。
製品選定において機能や価格はもちろん重要ですが、ロボットファイル開発の内製を検討するのであれば、「どれが開発者や組織に合うか」という見極めも重要であることが理解できたと思います。
筆者も覚えたての頃は、アクションステップ、デザインブロック他の各製品固有の用語を語って、それぞれをよく知っているかのようなふりをしていた時期もありました。しかしながら、徐々に自身と各製品との相性が明確になってきた記憶があります。
参考:設計と開発が一体のタイプ
ロボットファイルの開発の前に「オペレーションフロー」を作成するということについて、連載第3回ならびに第7回で紹介しました。
現行のオペレーションフローと導入後のフローがありますが、特に導入後のフローはユーザー要求をまとめたものであり、ロボット設計の肝に当たります。
オペレーションフローの作成が手間と感じるなら、フロー作成とロボットファイルの開発が表裏一体となっている製品もあるので、参考に紹介しておきます。

Blue Prismのオペレーションフローを表す画面の例です。
「ステージ」と呼ばれている各工程をダブルクリックすると、ロボットのアクションを定義するプロパティ画面が表示されます。設計と開発が一体の製品としては、他に「NICE」などが挙げられます。
定められたフォーマットでのフローとなりますが、設計と開発を同時に進められるのは便利です。
RPAシステム開発の手法
RPAをシステムとして開発する際は、複数あるいは多くのロボットを並行的に開発していきます。その中で「どのようなシステム開発の手法を採っているのか」ということですが、従来型のウオーターフォールとアジャイル開発のいずれのケースもあります。
現在の開発シーンではウオーターフォールが多数派と思われますが、徐々にアジャイル開発も増えています。
「早く稼働させたい」という現場の要求や、部門やエンドユーザーで利用するロボットが異なることなどから、小回りの利くアジャイルへのニーズが高いのでしょう。
筆者の想定ですが、ロボットの開発は、最終的にはアジャイルが主流になるのではないかと考えています。
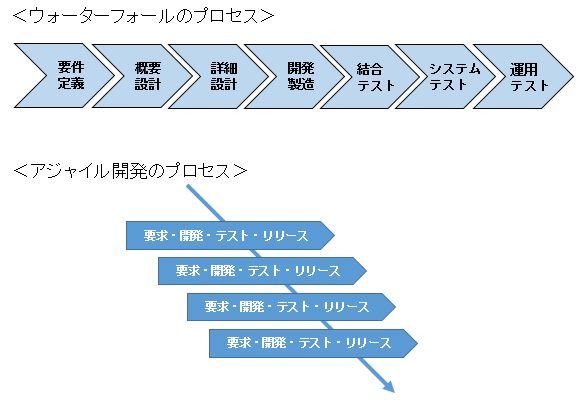 図表6 ウオーターフォールのプロセスとアジャイル開発のプロセス
図表6 ウオーターフォールのプロセスとアジャイル開発のプロセス
最終回は、RPAの導入後にフォーカス
今回はロボットファイルの開発を知ることと、開発現場での状況を理解していただくことを目標として解説を進めてきました。
最終回となる次回、第10回では、ロボットの運用管理やセキュリティなどのRPAの導入後にフォーカスして解説します。
筆者紹介
西村 泰洋(にしむら やすひろ)
富士通株式会社 フィールド・イノベーション本部 シニアディレクター
顧客企業を全社的に可視化して経営施策の効果を検証するサービスの指揮を執っている。著書に『図解入門 最新 RPAがよ〜くわかる本』(秀和システム)、『RFID+ICタグシステム導入・構築標準講座』(翔泳社)、『成功する企業提携』(NTT出版)がある。
関連記事
 ワイドテック、ロボットで業務を効率化する「WinActor」の販売を開始
ワイドテック、ロボットで業務を効率化する「WinActor」の販売を開始
ワイドテックはキーボードやマウス操作を自動化するRPAソフトウェア「WinActor」の販売を開始する。Windowsで動作するほとんどのソフトウェアに対応し、複数のソフトウェアを組み合わせた作業も自動化できる。 NEC、ロボットで定型業務を自動化する「RPAソリューション」を発売
NEC、ロボットで定型業務を自動化する「RPAソリューション」を発売
NECが、業務の定形操作をソフトウェアロボットで自動化する「RPAソリューション」の販売を開始。ソフトウェア製品「NEC Software Robot Solution」を軸に、導入前の適用検証サービスや導入後の支援サービスを併せて提供する。 「全体を見る」ためのビジネスプロセス・BPMの常識
「全体を見る」ためのビジネスプロセス・BPMの常識
企業向けアプリケーションのさまざまな“常識”をJavaのオープンソース・フレームワーク群である「JBoss」から学んでいきましょう。企業システムを構築するうえでの基礎となる知識をリファレンス感覚で説明していきます。初心者から中堅、ベテランまで大歓迎!
Copyright © ITmedia, Inc. All Rights Reserved.
アイティメディアからのお知らせ




注目のテーマ

編集部からのお知らせ
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。