iPhoneより多彩なAndroidのセンサをアプリで操作:Androidで動く携帯Javaアプリ作成入門(13)(3/3 ページ)
東西南北が分かる! 方位センサ
方位センサです。それぞれのセンサの値は、以下を参照します。
- SensorEvent#values[0]:
方位、0が北、90が東、180が南、270が西 - SensorEvent#values[1]:
ピッチ、上向き水平が0、立った状態が−90、うつぶせが−180と179、逆立ちが90 - SensorEvent#values[2]:
ロール、水平が0、左肩が上で90、右肩が上で−90(90と−90は値として存在しないようだ)
values[0]で東西南北の方位が取れるので、これだけでおおよその方位が分かります。
 図5 方位センサのサンプル
図5 方位センサのサンプルサンプルを起動して机の上などに置くと、図5のようにロボットは北を指差して回転します。この状態でほかのケータイを近づけると、ロボットが影響を受けて回ることから、先に紹介した磁界センサが内部的に使用されているのだと思います。
void onValueChanged(float[] values) {
Canvas canvas = getHolder().lockCanvas();
canvas.drawColor(Color.WHITE);
canvas.save();
Matrix matrix = new Matrix();
matrix.setRotate(-values[0], x + bitmap.getWidth() / 2, y + bitmap.getHeight() / 2);
canvas.setMatrix(matrix);
canvas.drawBitmap(bitmap, x, y, null);
canvas.restore();
getHolder().unlockCanvasAndPost(canvas);
}
ロボットを回している個所は、こんな感じです。方位の値がちょうど360度で渡されてくるので、扱いが簡単です。第2要素と第3要素の姿勢は、以下のような感じです。


 図6 方位センサの値
図6 方位センサの値身の回りの気温も分かる! 温度センサ
温度センサの値は、以下を参照します。
- SensorEvent#values[0]:温度
- SensorEvent#values[1]:使用されない
- SensorEvent#values[2]:使用されない
室温18℃の環境で、Android Dev Phone 1の温度センサは30〜34の範囲で値を取得しました。
ドキュメントには、取得した値の単位が何なのか記載されていませんが、ソースコードをあさったところ、摂氏であることが分かりました。
センサが何の温度を検出しているのかは、Android Dev Phone 1のソースコードが入手できていないため調べられていませんが、検証のために氷点下の屋外に10分ほど放置しておいたところ、−2℃まで下がったので(図7は、1℃)、少なくともAndroid Dev Phone 1の温度センサは外気の影響を受けると思っていいでしょう。
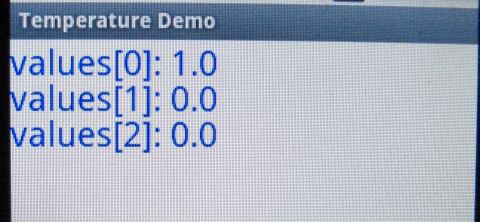 図7 温度センサのサンプルのデモ
図7 温度センサのサンプルのデモJavaでカメラ、GPSなどのハードウェアも制御しよう
「Javaでハードウェアを制御する」こと自体は、これまでのケータイJavaアプリでも、すでに行われてきたことですが、Androidは扱えるハードウェアが豊富なうえに自由度が高いので、ハードウェアを駆使したアプリが出てきてもおかしくありません。
ハードウェア制御の基本中の基本は、バイブレータですが、これはandroid.os.Vibratorクラスを見てもらえれば、すぐに使い方は分かると思います。そのほかのハードウェアとして、カメラ、GPS、Wi-Fi、Bluetoothなどがありますが、これらについても追って説明していきたいと思います。
- グーグルのAPIを使うときに欠かせないGoogle OAuthの作り方と使い方
- 細か過ぎて伝わってないけど開発者が知っておきたいAndroid Mの新機能まとめ
- 腕時計から電話をかけるAndroid Wearアプリの作り方
- Android Wear用アプリの花形、時計アプリ「Watch Face」の基本的な作り方
- Android 5.0発表&スマホと連動する音声認識Android Wearアプリの作り方
- ウェアラブル端末用Android Wearアプリ開発の基礎知識
- 変わらないと生き残れないAndroid Lの新機能まとめ
- Android WearやIoTで注目のAndroidセンサー機能8選
- ウェアラブル時代に見直したいAndroidの加速度/重力センサー、ジャイロスコープ
- あなたの知らないAndroid SDKの便利tools、14選まとめ
- Android 4.4のメモリ使用状況を把握する3つのツールの使い方
- Androidでリアルタイムマルチプレーゲームを開発するには
- 低性能端末でも使えるか? Android 4.4 KitKatの新機能39選
- もはや無料BaaS。ゲーム以外でも使いたくなるGoogle Play Game Servicesのデータ管理機能
- アプリにGoogle+のソーシャルグラフを持ち込めるGoogle Play Game Servicesの基礎知識
- あなたのアプリはクラウドにデータをバックアップできますか?
- Eclipse ADTに代わるIDEとなるか? Android Studioの基礎知識
- ActionBarで、アプリのUIはこんなにスマートになる
- Android 4.x時代のアプリにないと残念なActionBarとは
- 動的クラスローディングでAndroidアプリ“裏”開発
- Android 4.xのAndroidビームをアプリに組み込むには
- AndroidアプリでNFCタグを読み書きするための基礎知識
- 新タブレット時代を見据えるAndroid 4.2の新機能9選
- Androidからイヤフォンやヘルス機器とBluetooth通信するには
- Bluetoothを使ってAndroidアプリ同士で通信するには
- Androidアプリをアプリ内購読に対応してもうける方法
- 開発者が知らないと残念過ぎるAndroid 4.1の新機能36選
- Androidのプロセス間通信を自由自在にするAIDL
- Android 4.0のサービス/プロセス間通信の基本
- Androidアプリでマルチメディアを扱うための基礎知識
- Androidのウィジェットにノーティフィケーションするには
- Android 4.0で注目の顔認識をアプリに組み込むには
- Android 4.0でアプリ開発を始めるための環境構築
- 開発者が知らないと損するAndroid 4.0の新機能44選
- Android Compatibility packageで2.x系でもマルチサイズ対応
- Androidの画面の大きさの違いを解決するFragments
- Android 3.0の新APIで簡単ドラッグ&ドロップ実装
- 開発者が知って得するAndroid 2.3の新機能18選
- アニメーションでAndroidに独創的な画面エフェクトを
- Androidアプリで“アニメーション”するための基礎知識
- XMLレイアウトでAndroidアプリに“設定画面”を追加
- 開発者が知っておきたいAndroid 2.2の新機能12連発
- もはやケータイに必須のカメラをAndroidで制御しよう
- 地図/位置情報/GPSを使うAndroidアプリを作るには
- Android NDKでJNIを使用してアプリを高速化するには
- Android 2.1の新機能「Live Wallpaper」で作る、美しく燃える“待ち受け”
- iPhoneより多彩なAndroidのセンサをアプリで操作
- SurfaceViewならAndroidで高速描画ゲームが作れる
- Android 1.6のジェスチャーとテキスト読み上げを使う
- Androidのホーム画面に常駐するアプリを作るには
- Netbookにも広まるAndroidで、かつてないWeb体験を
- アプリを国際化してAndroid Marketから世界へ発信
- 常駐アプリが作成できるAndroidの“サービス”とは
- AndroidでSQLiteのDB操作をするための基礎知識
- Androidアプリの使いやすさを左右する5つのレイアウト
- 簡単でワクワクするAndroidウィジェット10連発!
- ブラウザや地図、ストリートビューの基、Intentとは?
- Androidアプリ作成の基本“Activity”とは何か?
- Android Market配布を目指しEclipseでHelloWorld!
関連記事
Copyright © ITmedia, Inc. All Rights Reserved.
アイティメディアからのお知らせ




注目のテーマ

編集部からのお知らせ
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。